Bezugssystem, Rechtwinkliges koordinatensystem – HEIDENHAIN TNC 360 User Manual Benutzerhandbuch
Seite 25
TNC 360
1-7
1
Einführung
Abb. 1.9:
Das geographische Koordinaten-
system ist ein absolutes Bezugs-
system
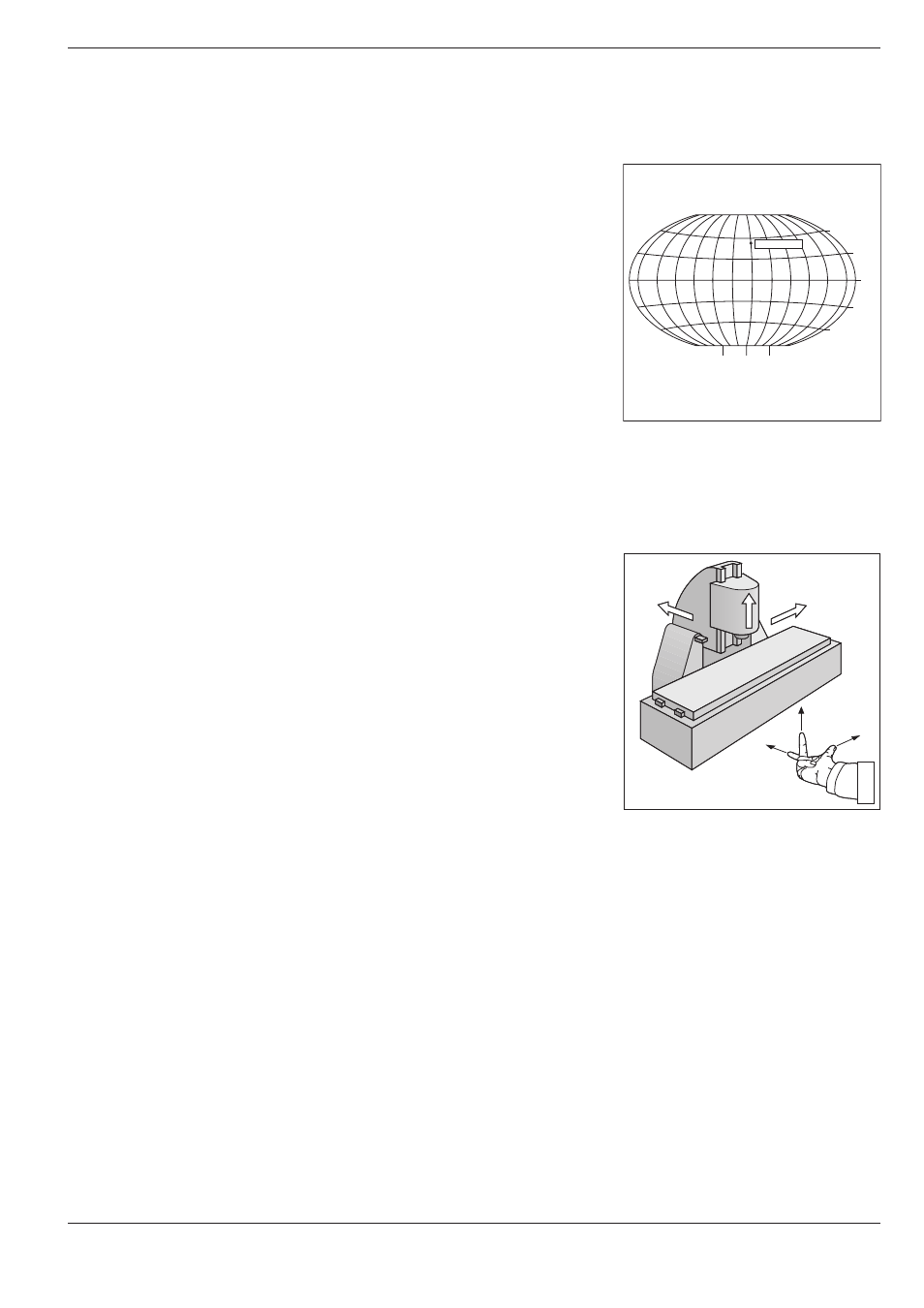
Abb. 1.10: Benennung und Richtungen der
Maschinenachsen an einer
Fräsmaschine
1.2
Grundlagen
0
°
90
°
90
°
0
°
30
°
30
°
60
°
60
°
Greenwich
+X
+Y
+Z
+X
+Z
+Y
Bezugssystem
Um Positionen angeben zu können, braucht man grundsätzlich ein Be-
zugssystem.
Beispielsweise können Orte auf der Erde durch ihre geographischen
Koordinaten (Koordinaten: lat. „Zugeordnete“; Größen zur Angabe bzw.
Festlegung von Positionen) „Länge“ und „Breite“ „absolut“ angegeben
werden: das Netz der Längen- und Breitenkreise stellt ein „absolutes
Bezugssystem“ dar – im Gegensatz zu einer „relativen“ Positionsangabe,
d.h. mit Bezug auf einen anderen, bekannten Ort.
Rechtwinkliges Koordinatensystem
Zur Bearbeitung eines Werkstücks auf einer Fräsmaschine, die mit einer
TNC-Bahnsteuerung ausgerüstet ist, geht man generell von einem
werkstückfesten kartesischen (= rechtwinkligen, nach dem französischen
Mathematiker und Philosphen René Descartes, lateinisch Renatus
Cartesius; 1596 bis 1650) Koordinatensystem aus, das aus den drei, zu
den Maschinenachsen parallelen Koordinatenachsen X, Y und Z besteht;
denkt man sich den Mittelfinger der rechten Hand in Richtung der
Werkzeugachse vom Werkstück zum Werkzeug zeigend, so weist er in
Richtung der positiven Z-Achse, der Daumen in Richtung der positiven X-
Achse und der Zeigefinger in Richtung der positiven Y-Achse.